e-inkディスプレイをちょくちょく見かけます。私がもっているものだとKindle Paper Whiteです。大きいと高いので安いものを探すとAm…
- ホーム
- ITで遊ぶ
ITで遊ぶ
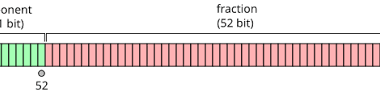
IEEE754 十進浮動小数点演算
ゆっくり調べようと思ったけれど優秀な記事があったので、これで勉強したつもりになった。また、実装しているCPUがまだまだ少ないのね。decimal型(十進…

Mac+UTM+Ubuntu+Lighttpd+PHP+MySQL+PHPMyadm…
今、Webアプリを開発するためにはレンタルサーバーの環境がnginx, php, mysqlが多い。それを考慮してMac上で開発環境を作るためには、VMのU…

AIを使ったプログラミング(2)
正月にAIを使ったプログラミングという記事を書きました。これまではこわごわでAIを使って本格的なプログラムを書いたことがなかったのですが、5月から6月にかけ…

データベースについての無知をさらす
久しぶりにテストシステムとしてMacのUTM(VM)でUbuntu22.04を動かしてLightppd, PHP, mysqlを入れようとしている。mysq…

スマホを徹底的に安く使う
以前、家庭用ネットワーク機器はむつかしいということを書きました。blackview wave8cというスマホをAmazonで10900円で入手し、そこに…

仕事のミスはシステムで防ぐのが当たり前!
ずーっとIT系エンジニアをやっているので「ミス対策」は考えねばならないことです。読んでいただいて仕事の「ミス」について考えが変わって欲しいと願っています。…
コマンドラインで生活ツール
GUI全盛の現代だが、Linuxを使う人はコマンドラインを使うと思う。わかんない人のために軽~く説明すると、Windowsにもある黒画面に C:\¥> ての…
hpのPCのキー割当についにキレる
hpのノートPCも持っている。作りがしっかりしているのがhpの特徴で嫌いじゃない。でも、homeキーだけは余計だ。しかもback spaceの右側にありミス…
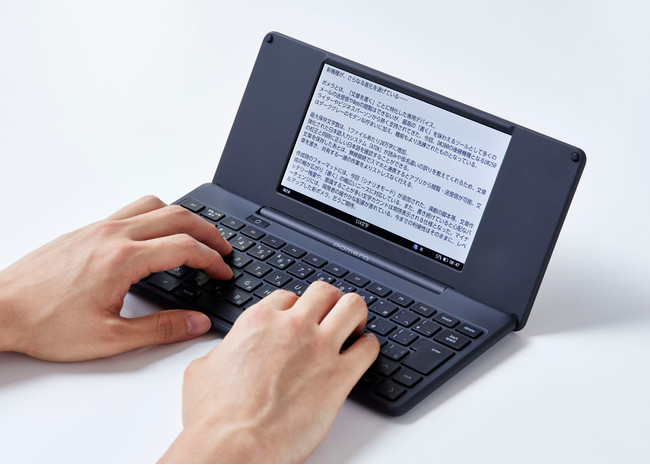
ポメラ(DM250)にLinuxインストール
疲れたので、現実逃避。賢者がやってくれたことをなぞるだけ。SONY製32GB マイクロSDをアリエク(Aliexpressのことらしい)でポチッとな…
ロングテールとビジネス構想
まだ目に見えていないものをわからない人々は多い。たしかに他人の先手を取らなくても生活はできる。だが、もらえる報酬はちょっぴりだ。必然が見えている人が勝つ…
Woocommerce用のインボイスと発送文書
いやぁ、ずいぶんと調べました。ことの発端は近頃、Woocommerceの梱包リストやインボイスに名前が出てこなくなったんです。Woocommerce…

家庭用ネットワーク機器は難しい
つい先日、スマホを失くしまして。。。セカンド機です。もしかして「ゼータク者め」とお感じになったかもしれません。決してそうではないことを書きた…

プログラミングの芸術的側面
たまに美術館に行く。たまに数学の本を読む。必ず思うことにしていることがある。作者や数学の定理の発見者の一生を。私をふくめて私達のほとんどは、…

ブラウザーとシリアル通信
大きく誤解を招く(少なくとも私は誤解した)ものにJavascriptのSerialとWebUSBがあります。これらふたつは別物です。WebUSBはとっく…
ERPの本質をあらためて説明しないと日本企業はわからないようだ
いつもの木村武史氏の「極限暴論」の今回のテーマがCIOが言う「ERP導入なんてやめちまえ」はまさに正論、DX成功の唯一の道とはなんだけれども、DXといってERP…
ロリポップでVSCodeを使う
長年の疑問だったロリポップサーバーでVSCodeを使う方法。ずっとSSH接続かと思っていたが、SSH接続は成功しない。ネットでは同じように失敗している人ばか…

ついに思ったとおりの海底地図が作れた
海底を撮影した写真をGPSデータをもとに地図に貼り付ける。これ単純なようで、私が一年がかりで作っている間いろいろ調べても世界で類似した例を見つけることが…
AIを使ったプログラミング
世の中では「プログラムをAIが書くようになり、プログラマーは不要になる」とかいう話しがまことしやかに広まっています。しかし私は使ってみた経験から「それは…

MacでWebサーバーの開発環境を整える
私の勘違いでなければ、MacはApache2が動いているハズ。これを使わないのはもったいない。試しにps -al|grep httpdをコマンドプロ…